貼吧帖子沉了(55555)
1. 無關話語樓主在狗喬伊那裡,通過《遊戲不止》瞭解到這款,可謂是集合了多種要素的遊戲,於是打算購買玩玩。原來被評論區老哥,說官方AI太傻的原因勸退購買。後來在遊戲群裡,看到群友都在開船,就下決心購買,加入impact了。
想到自己剛過完新手教程,直接去群裡坑隊友了。上船後只會拿著焊接槍修船,東西不會造,礦物不會分解,甚至是第一次下船,備用氧氣瓶都沒帶。船長給我幾根魚叉,我就下去了。結果隊友被迅猛龍圍毆,我只是看著,默默雙擊魚叉彈藥,還在疑惑嗎,怎麼沒辦法發射呀?!把他拖回船上的路上,他還在抱怨“你怎麼只是看著呀”。為了不坑隊友,我就單機了,然後發現,第一次出船的我,實在是太傻了,只拿了魚叉彈藥,沒拿魚叉槍。
單人玩起來,AI隊友還是蠻可以的,就是不會整理東西,每次換船都是船長一個人整理一大堆東西。船玩多了,就發現官船的各種問題了,尤其是電路問題。比如座頭鯨那個中央工程艙,就倆小水泵!左右艙室進水,直接向下排到壓載艙不就行了。
為了玩的更加愉快,就開始學習電路了,依據需求和貼吧搜尋,製作各種自動電路。
在這期間,發現貼吧沒有一個系統的電路教學,B站各種教學也是零零散散的。於是,一方面為了萌新更好的學習電路知識,另一方面也是為了避免重複造輪子並收集各種實用電路,本人有了製作這個電路教學兼收集的集合貼的想法。將自己見過的教學視訊或帖子,收集起來,加入自己的理解,寫一個讓萌新更加簡單的學習製作各種自動電路的帖子。
由於本人是文科生,僅有的一點電路知識,也是看相關科普視訊得到的,因此有什麼不正確的地方,麻煩各位大佬指正。
2. 相關教程B站小亦遊戲室:
基本線路講解ep.02 https://www.bilibili.com/video/BV1dM4y1w7dw
邏輯閘全面講解ep.03 https://www.bilibili.com/video/BV1pQ4y1e7mV
B站兔蔓:
潛艇編輯器基礎操作詳解 https://www.bilibili.com/video/BV1cU4y1R7rN
B站熵增之死:
潛艇編輯器教學 第三期電路篇 https://www.bilibili.com/video/BV11y4y1v7d6
潛艇編輯器教學 第四期接線篇 https://www.bilibili.com/video/BV1xy4y1S7Hf
貼吧@Kalthuzad:
【教程】萌新的捏船進階篇——邏輯電路教程 https://tieba.baidu.com/p/7172411479
3. 元件與訊號相關
首先要知道,各種電路元件,都是依靠01訊號來工作的。輸入一個訊號,經過某種運算,輸出一個結果訊號。在遊戲中,訊號有兩種:持續訊號和脈衝訊號(即非持續訊號)。
這裡引用@Kalthuzad的帖子,“持續訊號,顧名思義,就是元件傳送的訊號是連續的,從滿足條件開始到不滿足條件結束,舉個例子,水感測器發出的訊號就是個持續訊號,預設設定下在船艙內有水的時候發出的是1,沒水的時候發出的是0。
而脈衝訊號則是發出一下立刻就中斷,比如控制檯裡線圈放電,關閉反應堆這類的按鈕,包括有時候單獨放置的那個按鈕,每次點選的時候都會發出一個脈衝訊號。”
元件與訊號分類在大佬元件分類的基礎上,本人將常用的元件,按照更細的標準,劃分為訊號產生,訊號傳遞、訊號判定(檢查)、數學運算、邏輯判斷和狀態顯示這6種類別,列舉常用的元件,說明大致用法和訊號類別。後面提到具體電路,會詳細解釋用法。
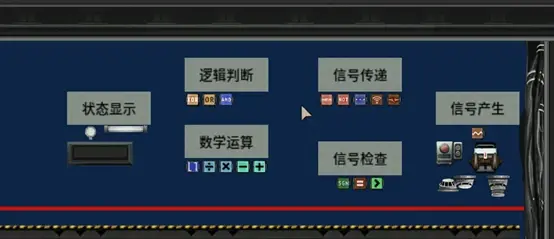 元件分類
元件分類訊號產生類:
按鈕,訊號燈開關,拉桿,按鈕單按一次產生脈衝訊號1,開關和拉桿輸出持續訊號1和0;運動感測器,水感測器,煙霧感測器,檢測到就輸出持續訊號1,沒有就輸出0(可自定義輸出資訊);振盪器,較為特殊的元件,不同模式,可以週期性的發出-1-1,0-1或0/1訊號,可以通過改變模式來改變輸出訊號型別,使用較少。當然,各種用電裝置,也可以算入訊號產生類,輸出持續訊號。
終端,算是一個使用很少,但是用處很大的元件。輸入輸出文字/數字的脈衝訊號,還能檢測各種訊號類別。由於不怎麼使用,所以就暫時不算入常用裝置了。
 用終端來檢測訊號
用終端來檢測訊號訊號傳遞類:
WiFi元件,延遲門,繼電器,not門,用來傳遞訊號,不改變輸入訊號型別。即輸入什麼訊號,就輸出什麼訊號。還有一個比較特殊的存在,記憶體元件。這東西,既可以算是訊號產生,也可以是訊號傳遞。只要記憶體中有值,就會一直輸出,所以是持續訊號。
訊號檢查類:
SGN訊號檢查元件,等於元件,數值對比元件(大小元件)。由於功能是訊號檢查,因此會產生對比結果,結果訊號型別依據輸入訊號種類來判定。輸入訊號中,有一個訊號是持續訊號,則結果是持續訊號。需要說明的是,SGN訊號檢查元件,只有一個輸入口,因此輸出結果訊號型別,還是取決於輸入訊號型別,符合上面的說法。
邏輯判斷類:
and,or,xor,兩個輸入口輸入1和0,經過邏輯判斷輸出1/0,會輸出持續訊號,無論輸入訊號是持續還是脈衝訊號(總不可能是兩個脈衝訊號來對比吧,因此只要有一個訊號是持續訊號,則輸出持續訊號)。
數學運算類:
加減乘除,正弦餘弦整數等,就是單純的計算數字和輸出數字。所有輸入口都是持續訊號,則輸出持續訊號,否則就是脈衝訊號
狀態顯示類:
文字顯示器,光學元件,應急燈。用來顯示顏色或文字,一般都是用來指示用電裝置狀態和電路開啟狀態,通過“設定/切換狀態”來啟用。如果有需要,通過聲音傳遞的應急報警器,也可以。
元件的時間範圍:這個比較特殊,暫時用不上,而且也難以理解。本人做了個試驗,範圍設定為10秒,第二個訊號在第5秒輸入。結果是第5秒立即參與運算,並儲存5秒,結果輸出為持續訊號。也不知道到底是什麼作用。建議不動就行。
無/空/文字訊號這幾個是較為特殊的,也是DIY電路一定會遇到的訊號。
這裡還是引用@Kalthuzad大佬的帖子原文“這兩個概念非常容易混淆,無訊號是指這個接收端的上一級沒有任何訊號傳輸,比如你在一個按鈕後方接了一個元件,按鈕按下去了,傳送了一個脈衝訊號,那麼在其他時間,後方的元件的輸入端就是無訊號的狀態;而空訊號實質上是一個字元訊號,它和a,b,c,d這類訊號的型別一樣,不過這個訊號的字元為空,直觀點的例子就是你在Excel裡找一個單元格輸入=""後回車,這個單元格的內容就和所謂的空訊號一樣了”。
一個簡單的例子,任何元件上面,輸入訊號沒有接任何線,則此時輸入訊號是無訊號;接了但是沒有內容(如數字和文字),此時就是空訊號。在當前版本,無訊號不參與元件運算,但是空訊號會參與,並被不同元件識別。
這一點很重要,尤其是在自己設定電路,邏輯上判斷結果正確,但是電路就是有問題尋找原因的時候。使用邏輯判斷元件,尤其要注意空訊號的問題
數字運算,無訊號不參與運算且無結果;空訊號被識別為0並參與運算,有結果;文字被識別為0。
邏輯判斷,識別無訊號為0,空訊號為1,都參與邏輯判斷;not邏輯閘,不識別無訊號且不參與判斷,識別空訊號並直接輸出1;二者都識別文字為1。
數學運算和邏輯判斷,兩者都識別無訊號為0。
總結,數學運算,除數字之外的訊號被識別為0;邏輯判斷,除0之外的都被識別為1。
繼電器,狀態預設開啟,不識別無訊號。若接到設定狀態上,空訊號被識別為1(相當於預設開啟)。其他元件類似,不識別無訊號。
下圖為or和AND識別空訊號結果。
 空訊號
空訊號邏輯閘判斷
邏輯閘判斷,有兩種結果,真輸出和假輸出。
(這裡說一下,邏輯閘判斷和訊號檢查元件大致相似,都是對輸入訊號有兩種判定結果,即條件成立輸出什麼,條件不成立輸出什麼。現例項子,就是一個人對一個問題,就只有兩種答案,知道和不知道。)
真輸出是結果為1的輸出,假輸出是結果為0的輸出。以下是測試結果:
AND,真為111,其他均為假;OR,3種情況輸出1為真,1種情況輸出0為假;XOR,2種情況輸出1為真,輸出0為假;總結,邏輯運算元件,滿足條件為輸出1真結果,不滿足條件輸出0假結果。
邏輯元件,如果設定某個輸出為空,則此時輸出空訊號。用電器對空訊號無反應,但是運算元件依然會識別為0。
附:邏輯閘運算錶連結 https://wenku.baidu.com/view/9dc9d975ac45b307e87101f69e3143323968f5a7.html?_wkts_=1676528204304&bdQuery=%E9%80%BB%E8%BE%91%E9%97%A8%E8%BF%90%E7%AE%97%E8%A1%A8
4. 各種實用自動電路
參考帖子:
總結一下游戲內各種實用性電路設計 https://tieba.baidu.com/p/7191164055
實用功能的介紹與教學 https://tieba.baidu.com/p/7764537759
此時開始,本人將開始講解各種見到過的實用自動電路,從簡單到複雜,分為日常、修理、戰鬥和開船四打類。所有的電路都通過編輯器展示。中間涉及到的元件,會盡可能詳細的說明元件的作用。畢竟,只有瞭解了基礎工具的用法,才能在製作東西的時候,想到該用哪些工具。想要製作出哪些功能,慢慢拆解就能知道需要哪些元件。
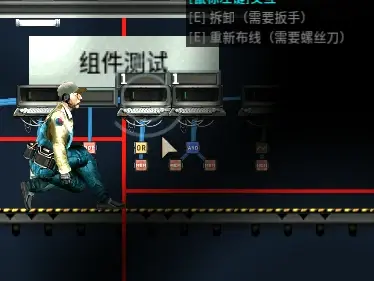
接線基礎戰役接線教程:
和官方教程一樣,一手拿著螺絲刀,一手裝備導線(什麼顏色都行)。然後靠近電器或元件,按E進入接線面板。把線拖動到介面上,或者是把線從介面上拔下來。右鍵退出面板,此時左鍵可給導線新增固定點/右鍵去掉固定點,實現彎曲效果。
 蛇形彎曲
蛇形彎曲編輯器接線教程:
【搬運】官方潛艇製作編輯器手冊 https://tieba.baidu.com/p/6180702055
潛艇編輯器基礎操作詳解 https://www.bilibili.com/video/BV1cU4y1R7rN
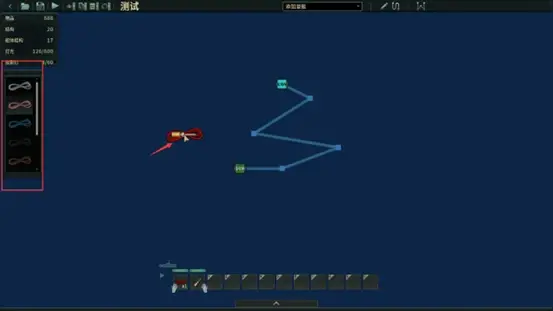
給各位新玩家,簡單介紹一下編輯器介面:
 官方編輯器
官方編輯器1.開啟檔案,一般是開啟潛艇檔案,編輯器會自動載入啟用模組和本地潛艇/前哨站等檔案。
2.儲存檔案,沒什麼可說的。蛋疼的是,沒有關閉檔案按鈕。這就導致,想要重新回到這個介面,Ctrl+A全選然後刪除,或者是退出編輯器重新進入。
3.測試,用來測試編輯好的潛艇,可以控制人物活動的那種,可惜沒有戰役中的站點,怪物和各種地形。完整的測試,還是的靠戰役模式。
4.可見性,非常實用的功能,用來專門編輯不同類別的東西,就是PS圖層可見性的功能。如果想要編輯結構和裝飾,但是不想動裝置和接線,那麼只把這兩項開啟。
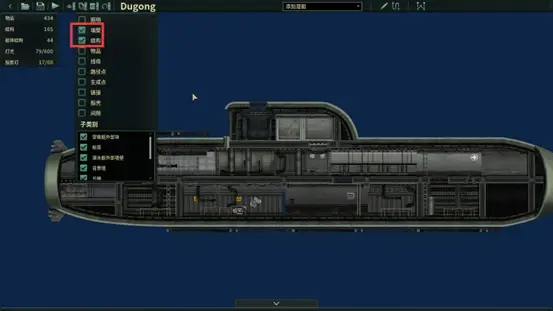 設定可見性
設定可見性5.歷史操作,PS歷史功能,用來回檔。如果編輯好的效果不行,可以拉到之前的步驟,或者是重新開啟檔案。需要說明的是,接線模式下,改動的步驟不會被儲存,只能重新載入檔案(祈禱之前沒有手賤儲存吧,不然就再改回去)。
6.物品分類,就是潛艇上所有的東西都分好的列表,想要什麼直接點類別即可。
7.組合,DIY電路的儲存方法。如果製作好了一個DIY電路,如何用到其他潛艇上去呢?還是一個一個慢慢擺放?有了這個功能,你可以一鍵儲存並直接在其他潛艇上引用。
 DIY組合
DIY組合提醒,儲存的DIY電路,會自動為生成一個本地mod。如果沒有在模組介面引用,則編輯器中就沒有這個組合。
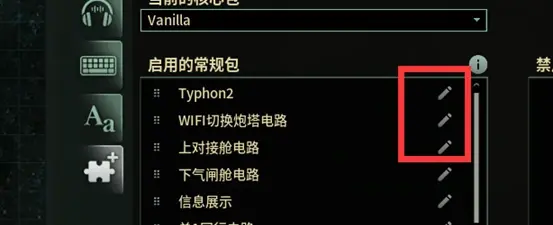 記得啟用
記得啟用8.新增潛艇,用來新增並連結無人機(尤其是大佬的)。如果直接在一個潛艇的編輯介面, 製作無人機。那麼測試的時候,無人機就無法移動,因為成為了該潛艇結構的一部分。
下面說一下操作。
預設狀態Ctrl+1下,是物品放置/移動模式。
放置物品:從下面的類別中,點選物品為複製物品,再次點選為放置物品,最後右鍵一下為取消複製物品。選中物品後,按住Ctrl+移動,為複製效果。
移動物品:點選想要的物品,再次拖動做就可以放置到想要的位置,點選空白處取消選中。
滑鼠滾輪縮放畫面,按住滑鼠中間可以移動畫布。
Ctrl+2是接線模式。此時操作戰役模式一樣,不同的是,1-5號是不同導線顏色的快捷鍵,無需用滑鼠慢慢選。新增/刪除固定節點,需要先選中導線,然後按住Ctrl+左鍵/右鍵。在熟悉了接線方式後,就可以開始製作各種電路了。
 數字選擇不同顏色的導線
數字選擇不同顏色的導線由於在戰役模式中,很難調節原本的電路(典型的就是官方的自動關門,元件在牆裡),因此推薦在編輯器中製作各種電路。
另外,DIY各種電路後,在戰役中測試才算完整。但是換船又很麻煩,改名重新購買。於 是推薦使用這個潛淵症編輯器存檔修改網站:https://ignis05.github.io/baro-save-editor/,把已有的船,更新一下就可以直接用了,無需重新購買(就是物資還是的手動搬運)。
日常1) 自動閘電路
使用場景:
每次開門都要點選?修個船,左右上下跑,左鍵都點麻了?TMD,只有座頭鯨是自動門麼?官方你是故意的麼,明明可以裝自動門,就是TM要點選開門?!
電路元件:
 自動開關門
自動開關門運動感測器(狀態輸出)-門(設定狀態),箭頭指示訊號傳遞方向
元件說明:
1.運動感測器,用來檢測運動物體,包括人,寵物,怪物和牆壁(可包括屍體,但是一般不使用)。檢測到人則輸出1,否則輸出0。可以設定檢測型別,和檢測範圍。範圍可以在水平和垂直位置上調整。
關於範圍調整,水平X正數為向右,負數為向左;垂直Y正數為向上,負數為向下。即正數為右上,負數為左下。
 檢測範圍
檢測範圍當然,用這個感測器可以玩出很多花樣。最重要的,就是設定檢測速度為0,此時運動感測器,就變成了生物檢測器了。如果不設定,人只有動起來,感測器才會輸出1,門才會開啟。
2.設定狀態和切換狀態的不同。還記得上面說的持續訊號和脈衝訊號麼,就兩個狀態就是對應不同型別的訊號。設定狀態對應持續訊號1/0,切換狀態對應脈衝訊號1(對0無反應)。
設定狀態收到持續的1/0,則保持門開啟/關閉。如果是接受到脈衝訊號1,則只會開啟/關閉,不會一直保持;切換狀態收到一次脈衝訊號1,則切換一次狀態為1/0(如原本是0關門,則切換為1開門)。如果收到持續訊號1,會頻繁切換導致門鬼畜開關。
2) 進水自動開閘電路應用場景:
以座頭鯨為例。左邊的引擎艙,艙室本身沒有配置水泵,且下面的壓載艙門,是手動艙門。這就導致,一旦破洞進水,AI跑去修理,就會把水引向只有兩個小水泵的工程艙,而壓載艙那個大水泵就閒置了。
為了提高排水效率,把壓載艙門改為有水自動開啟,無水為手動開啟的狀態。
 經典場景
經典場景電路元件:
 進水自動開門
進水自動開門水感測器(訊號輸出,只輸出1)-門(設定狀態)
元件說明:
水感測器,和上面的運動感測器一樣,當檢測到有水,則輸出1,無水輸出0(煙霧感測器同理)。在本電路中,特意把無水輸出訊號調整為空,這樣,當有水的時候,只會自動開啟。關閉就要靠手動,或者是新增元件了。
3) 進水自動閘電路應用場景:
把這兩者結合起來,實現平時自動開關門,遇水自動開門,無水後變為自動門。
 組合自動門
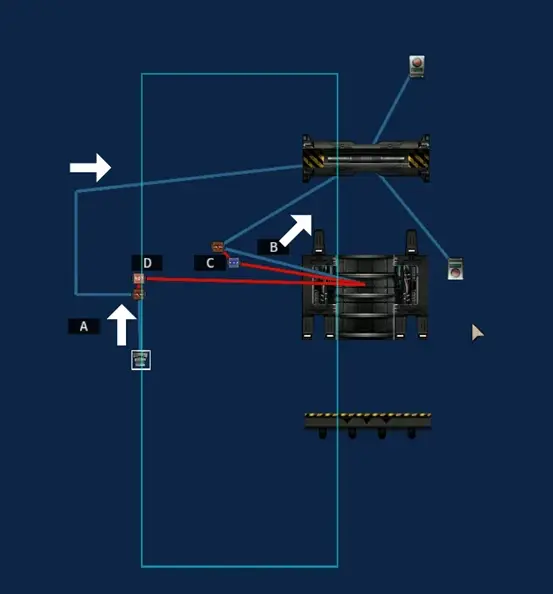
組合自動門電路元件:
為了方便說明,分為多個電路。藍色為設定門訊號,紅色為設定繼電器狀態訊號。
A水感測器(只輸出1)-門(設定狀態)
B運動感測器(輸出1/0)-繼電器訊號1-門(設定狀態)
C水感測器-NOT門-繼電器(設定狀態)
執行說明:
(1)當無水時,水感測器輸出空訊號,此時門不對空訊號有反應,因此無效果。NOT門傳遞空訊號為1,繼電器開啟(預設開啟),此時位移感測器控制門狀態,有人開啟,無人關閉
(2)當有水時,水感測器輸出1,控制門開啟。1經過NOT門,轉變為0,此時設定繼電器為關閉,則位移感測器無效果。
元件說明:
1.繼電器,是遊戲中常用的元件之一。因為遊戲本身設定,一個訊號口,只能連線5根訊號線。因此,如何連線多個用電器,無論是送電還是訊號傳輸都成了問題。
舉個例子,反應堆發電,其他電器用電。如果沒有接線盒(電源分配)和繼電器(訊號分發),則反應堆只能給5個電器供電。
而繼電器,就是來解決這個問題的。本身可以充當小型插線板,為多個小功耗電器(如照明燈,小水泵,潛水櫃和導航終端)送電,還能讓一個訊號連線多個訊號口。因此繼電器可以讓一個訊號口連線多個甚至無限個訊號口,1繼電器+4用電器訊號口,實現1個開關控制全船電器。
同時繼電器本身,還能設定開啟關閉,做到控制輸入訊號的是否輸出。
下圖,就是典型的繼電器接線面板畫面,1輸入對n輸出,1:n。
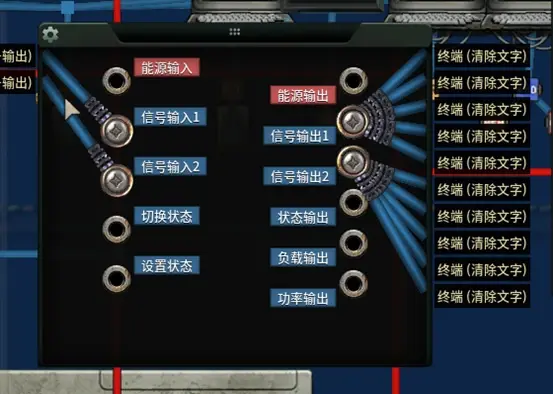 經典繼電器接線面板
經典繼電器接線面板2.NOT門。將接收到的訊號,1轉變為0,0轉變為1。本身和AND,OR,XOR不一樣,不會改變訊號型別。這就是我把NOT門分類到訊號傳輸類的原因。
拓展:
 拓展
拓展如果是垂直門,如何實現左右兩邊只要一邊進水,就開門呢?很簡單,兩個水感測器,輸出到一個OR門即可(兩邊都進水才判定,則改為AND)。注意,此時要修改水感測器在無水情況下輸出0。不然無水的情況下,輸出空訊號,會被OR門識別為1。導致門一直開啟,運動感測器失效。
4) 自動滅火抽水電路應用場景:
什麼,起火了?滅火器在哪?怎麼火滅不了啊!滅火器用完了!! WC,上面對接艙門打不開,只能砸牆了(來自本人的親身經歷)。
電路元件(忘記加箭頭了,還是感測器向水泵輸送訊號,湊合看吧。面板是水泵的):
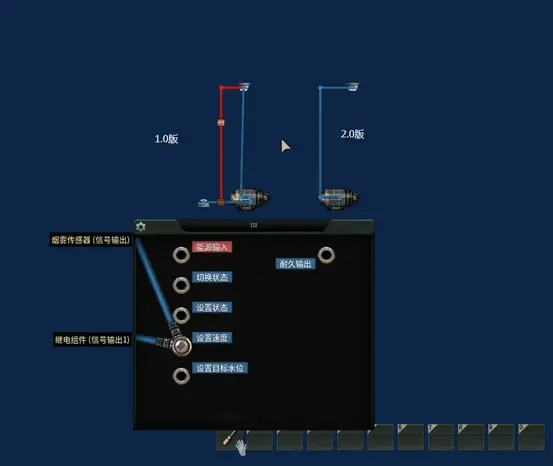 自動水泵
自動水泵1.0版
A煙霧感測器(只在有火情況下輸出100)-水泵(保持電源開啟,設定速度)
B水感測器(有水情況下輸出-100,無水輸出0)-繼電器訊號1-水泵(設定速度)
C煙霧感測器-NOT門-繼電器狀態
2.0版
煙霧感測器(有火輸出100,無火輸出-100)-水泵(設定目標水位)
執行說明:
1.0版
(1)有火情況下,煙霧感測器輸出100,開啟水泵進水。同時100被NOT門識別為1,輸出為0到繼電器狀態,關閉水感測器。
(2)無火情況下,煙霧感測器輸出空訊號,水泵無反應。同時NOT門識別空訊號為1到繼電器,繼電器開啟。此時有水(抽水滅火或漏洞進水),水感測器輸出-100,水泵速度設定為-100,抽水。抽完水之後,則速度為0,水泵停止工作。
2.0版:水泵的設定水位比較特殊,自帶水位感測器。-100就是無水,0就是一半水位,100就是滿水。具體可參考@L1A1-F1大佬的帖子 實用功能的介紹與教學,原文引用:“泵的水位設定;這個就比較有意思了,因為這個設定還整合了水位感應功能,連水感測器都省了。
先設一個標準艙段大小的hull,當hull內的水位達50%時,在水位設定眼裡就是0,當水灌滿時,水位是100,排空則是-100。
也就是說,設定100是注滿水,設定0是注一半,設定-100是排空。
而且與速度設定不同,水位設定是排/注水時,當水位即將達到設定水位,就會減速,並停止在設定的水位。
也就是說,水位設定整合了:啟停、速度設定和水感應這三個功能”。
5) 文字顯示器開啟關閉顯示應用場景:
如何知道某個用電裝置的狀態呢?怎麼知道DIY電路是否起開啟了呢?可以用光學元件來顯示啊!光學元件明明開著,為什麼不顯示設定顏色呢?
 狀態文字顯示
狀態文字顯示電路元件:
元件(狀態輸出)-SGN訊號檢查元件(對比訊號1)-文字顯示器(設定文字)
執行說明:
開關或元件狀態輸出1,SGN檢測到1,輸出“線上”二字和“文字顏色為綠色”到文字顯示器。否則,就顯示“離線”和“文字顏色為紅色”到文字顯示器。
元件說明:
1.訊號檢查元件,用來檢查輸入訊號是否是設定對比的訊號。如果相同,則輸出真結果,不相同就輸出假結果。就如同我上面填寫的那樣,檢測訊號為1。如果輸入訊號是1,則輸出“線上”兩字,否則就輸出“離線”二字,無論輸入訊號是空訊號,其他數字還是文字訊號,只要不是1。
這也重複了我上面說道的一點:大部分元件,對一個輸入訊號,有兩種輸出訊號。即真或假(知道或不知道、符合或不符合)
2.文字顯示器,就是用來顯示數字或文字的。簡單用法,如把反應堆剩餘燃料訊號,接到文字顯示器設定文字上,就能實時看到燃料剩餘數字了。
3.光學元件,製作手電筒的材料,也可以直接用來顯示狀態(無需供電)。有切換狀態,設定狀態和設定顏色三個介面。用法和門一樣,開啟狀態會顯示設定的顏色(可手動調節RGB數值),關閉狀態就不顯示顏色。
特別說明:
由於本遊戲,燈光有互相覆蓋的可能,這就導致,光學元件燈的顏色,會被其他大功率照明電器或潛水服頭盔燈顏色覆蓋掉,最終顯示為白色。如下面這個圖,紅色區域是實際測試區域(懶得清空背景了)。上圖未開啟左邊電燈,還能看到紅色燈光。而下圖開啟電燈,就完全看不到紅色燈光了。而文字顯示器的顏色,還是正常顯示。
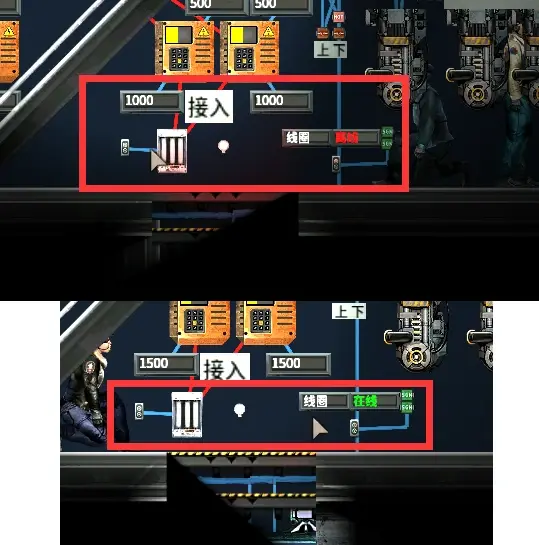
拓展:
在只接一個SGN的情況下,文字顯示器只會顯示白色文字。如何顯示顏色呢?還記得文字顯示器有設定文字顏色的介面吧,兩個SGN,一個負責檢測1,輸出文字,另一個(也 檢測1,或者是“線上”二字)負責輸出文字顏色程式碼,通過設定RGB數值(在英文輸入法狀態下,255,0,0為紅色,0,255.0為綠色)來調整顏色。
SGN結合光學元件,還能做出什麼呢!
6) 半自動對接艙閘電路應用場景:
每次出去撿上面的怪物屍體或挖上面的礦,都要走下面的氣閘艙(如果上面有氣閘,當我沒說)?繞遠路,不能直接開啟上面的對接艙門出去麼?咦,怎麼是鎖定關閉的?
電路元件:
 自動對接門
自動對接門A運動感測器(只輸出0)-繼電器(訊號1)-門(設定狀態)
B橫向對接艙口(狀態輸出1/0)-繼電器(訊號2)-門(設定狀態)
C橫向對接艙口(狀態輸出1/0)-延遲門(0.2秒)-B繼電器(設定狀態)
D橫向對接艙口(狀態輸出1/0)-NOT門-A繼電器(設定狀態)
和上面一樣,藍色是設定狀態線,紅色是設定繼電器狀態線。當然,還有兩個按鈕,接到門切換狀態,用於開門(運動感測器範圍挪不過去了,就當範圍覆蓋艙門上面和下面吧)。
執行說明:
(1)在離開站點+無人在這個區域情況下,此時對接艙口輸出0,B電路關門,C電路啟用並在0.2秒後關閉B電路。同時D電路啟用並開啟A電路。此時C關閉B,D開啟A
(2)在離開站點+有人在這個區域情況下,門關閉但是不會保持關閉(C關閉B),可通過按鈕開啟艙門。人離開這個區域後,運動感測器輸出0關門,實現手動開啟,離開後自動關閉的功能,避免人出去後,怪物直接跑進來的情況,
(3)對接站點後,橫向對接艙口輸出1。0.2秒後C開啟B,然後開門並保持開門狀態。此時D關閉A。
結果就是,在對接站點後,門保持開啟。在離開站點後,門可以手動開啟,人離開後自動關閉。
特別說明:
官方那一堆元件,是真的搞不懂,直接把橫向對接艙口狀態輸出到門設定狀態就完事了。
訊號-延遲門-繼電器(設定狀態),可以做到只有1才開啟。延遲門換成SGN同理(寫文我才想到這個!!!)。
7) 到站關閉反應堆電路(過期)應用場景:
據說之前的老版本,對接正常站點之後,還是會消耗燃料棒。於是廣大玩家,為了白嫖站點電力,得手動關閉反應堆。要麼是依靠反應堆平板,要麼是開關-導線-關閉反應堆訊號口。對接每個站點之後,都得手動關閉,太麻煩了,於是有了這個電路。
電路元件(既然過期了,就給個思路吧):
對接艙門(狀態)-訊號檢測元件(檢測訊號1,真1,假空)-繼電邏輯器(按鈕-設定狀態電路)-反應堆(關閉)
因為關閉訊號口會對任何非空訊號都有反應,所以不能直接用NOT門,只能靠SGN訊號檢查元件來輸出1。另外,對接普通站點自動關閉反應堆,但是當對接敵對或空站點就需要關閉電路,不然自動關閉反應堆會斷電。
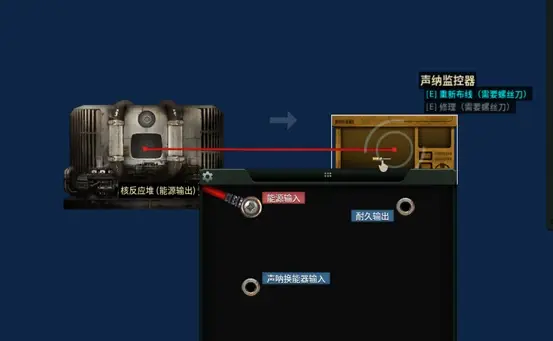
修理8) 簡易反丘腦電路
使用場景:
相信各位從萌新時期過來的老玩家,或者是萌新,第一次見識到丘腦寄生的時候,都是一臉懵逼的。這東西怎麼處理?我怎麼掉血了?用噴火器燒,怎麼著火了???
記得本人第一次遇到丘腦寄生的時候,用船長拿著焊槍去燒,結果船長掛了,被燒死的;第二次拿著噴火器去燒,丘腦沒了,但是船著火了;第三次扔手雷,三四個才解決。後來貼吧找了下,就發現這個簡單的電路了。
參考帖子:
一個簡易的半自動反丘腦裝置 https://tieba.baidu.com/p/8202339990
電路元件:
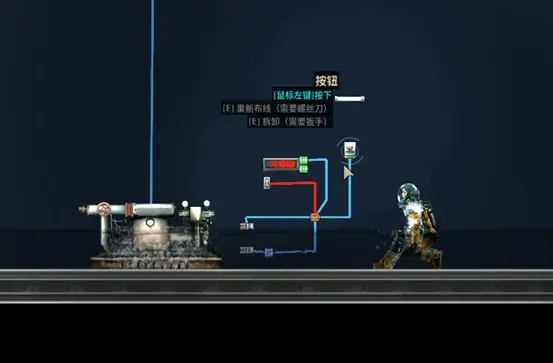 手動引爆
手動引爆按鈕-導線-雷管*2,雷管裡面塞破片手雷(精品品質,另外不要使用C4,壓載艙會消失的)。當然,進階版本的電路,新增延遲門和修復手雷,做到先引爆清除丘腦,再引爆修復手雷修復壓載艙。對了,記得擺放雷管和水泵中心稍微遠一點,不然裝填手雷,半天對不上(指一直顯示為水泵)。為了避免誤觸發,還可以加個繼電器,然後把上面的文字顯示器用上。
9) 自動反丘腦電路應用場景:
手動開啟,那還叫自動電路麼?.jpg
電路元件:
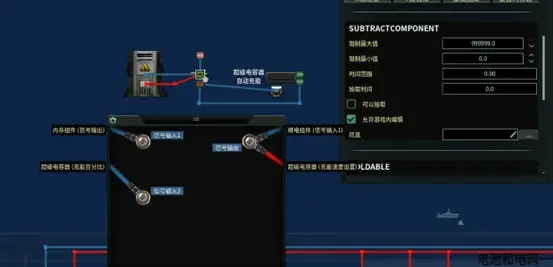
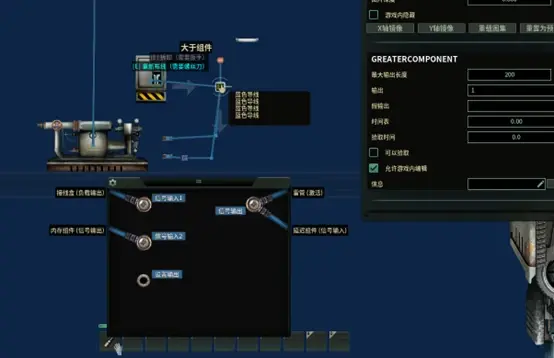 自動引爆(換SGN更簡單)
自動引爆(換SGN更簡單)接線盒(負載輸出)-數值對比元件(接線盒訊號1,記憶體訊號2,真結果為1,假結果為空)-雷管(觸發)
參考帖子:
關於如何自動檢測丘腦並斷電的實驗 https://tieba.baidu.com/p/8091603580
原理:
水泵旁邊放置一個沒有接入電源和任何用電器的空接線盒(此時負載為0),然後輸出負載。因為丘腦生長會吸收電力,即使沒有電也會形成負載。負載+記憶體接入到比較元件1和2訊號,1則開啟雷管引爆。
元件說明:
1.記憶體元件,用來儲存輸入資訊(數字或文字)的元件,常用,可手動輸入也可以通過訊號口輸入,輸出為持續訊號。
2.訊號比較元件(大於元件),用來比較輸入訊號1和輸入訊號2的值。如果1>2,則輸出真結果(數字或文字),否則(小於和等於)就是假結果。注意,如果上面線接反了,則此時要設定假結果為1。
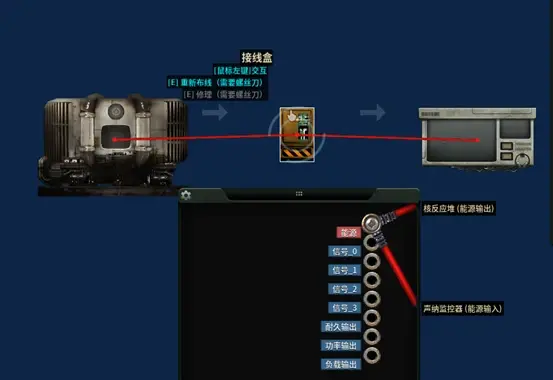
3.接線盒,用來分配電力的裝置,連線發電裝置(反應堆/電池)和用電裝置。基本不會用到訊號口。而且由於訊號口只能接5條導線,因此,連線全船的用電器,就要用到多個接線盒。接線盒連線方式有兩種,串聯和星型。中間接線盒,既要接上面,又要接下面,因此還剩餘3個位置給用電器。建議將電燈小水泵潛水櫃等小型裝置,用繼電器連線即可。畢竟接線盒體積比繼電器大多了。
 接線盒
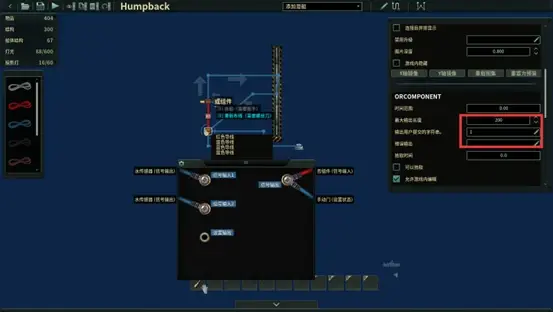
接線盒10) 耐久度顯示
應用場景:
多人聯機才發現,玩家擔任工程師和機修工,有一個很麻煩的問題,就是不知道應該修哪些東西。畢竟不是AI,沒有腦機介面。在沒有做出檢測平板的情況下,只能蹭船長的狀態顯示器(老往指揮室跑)。
電路元件:
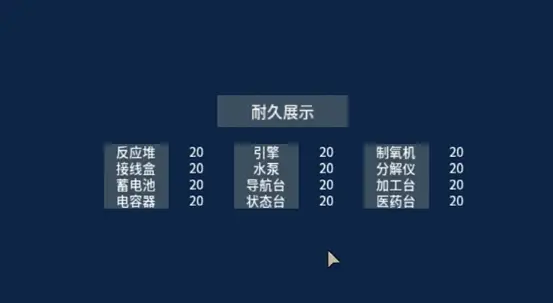 整合顯示
整合顯示很簡單,各種主要裝置(狀態輸出)-文字顯示器(設定文字)。為了區分,可以用編輯器標籤來寫明裝置名稱(編輯器搜尋“標籤”即可)。mod船的中央資訊顯示屏,也是用這個做出來的。導線看起來太礙眼,可以勾選“在遊戲中隱藏”。
開船11) 燃料更換警告電路
應用場景:
嘢,怎麼停電了(常見於沒有電池的官船)?AI沒有更換燃料棒麼???原來只有燒完了,才會自動更換麼???
(說明一下,在有電池的情況下,可以等燒完再讓AI換,反正做貧化燃料的燃料棒,可以是0%,因此本電路,適合開沒有電池的船,或者是想要低成本修信標站的玩家)。
參考視訊:超簡單的燃料報警提示 https://www.bilibili.com/video/BV15d4y1i7nB
電路元件:
 WIFI告警
WIFI告警反應堆剩餘燃料訊號1+記憶體元件10訊號2-對比元件-WIFI元件(訊號輸入)
 左下角
左下角元件說明:
1.對比元件,用來對比兩個輸入數值大小的元件。如果訊號1數值>訊號2數值,則輸出真結果,否則為假結果。這裡,真輸出填寫“燃料告急,更換燃料棒”之類的文字。假輸 出保持為空。
2.WIFI元件,是區別於導線有線傳遞訊號的無線傳輸元件。頻道一致的WIFI元件才能互相傳遞訊號(還得是一個輸出,另一個輸入)。勾選連結到聊天,就可以把資訊傳送到無線電聊天介面,或者是通過無線電輸出特定訊號來實現遠端開啟功能。
由於無線電聊天頻道預設為0,因此在本電路中,設定輸出WIFI的頻道為0。另外記得把聊天時間間隔,調整為4-5秒,不然會每一秒都傳送一次。
想想,WIFI(輸出)-SGN又能做出什麼好東西呢。
電網知識在說下面這個減小過載的電路之前,讓我們先了解一下發電裝置反應堆和用電裝置組合形成的電網。
參考視訊:
潛艇編輯器教學 第三期電路篇 https://www.bilibili.com/video/BV11y4y1v7d6
基礎1.在本遊戲中,產生電力的裝置只有反應堆(電池算是儲電裝置),其他都是用電裝置。兩者之間連線起來,非常簡單,沒有現實中需要兩種線的限制,只需要把反應堆能源輸出,通過一根線(一般是紅色導線),接到用電器能源輸入口即可。
 夠簡單吧
夠簡單吧反應堆(和電池)輸出的電量總和,稱為功率;用電器裝置需要的電力之和,稱為負載。功率大於負載,即發電量大於用電量,在2倍的情況下(發電量≥2*用電量),會形成電力負載,損壞接線盒,如同多餘的水漲壞了水管;而功率小於負載,即發電量小於用電量,在0.5的情況下(發電量≤0.5*用電量),會形成電力不足,導致用電裝置無法正常啟動,顯示為潛艇燈光閃爍,全速開動引擎但是沒反應。
為了解決這兩個問題,電池就派上用場了。
2.回到上面。但是呢,反應堆能源輸出,只能接一條線,其他用電器怎麼接上去呢?使用上面提到的接線盒和繼電器。由於繼電器預設上線是1000,因此,大部分大功率用電器,都是用接線盒連線的。奇怪的是,接線盒並沒有輸入輸出兩個口,只能共用一個能源口。 還記得之前提及過的5根導線限制麼。如果此時大功率用電裝置數量超過5,多出來的一個就沒辦法接上去了。此時,就需要更多的接線盒了。
 多個步驟
多個步驟此時,反應堆(發電裝置)-接線盒(連線裝置)-聲吶(用電裝置),就構成了一個電網。
簡單理解,反應堆就是牆上只有一個孔的插座,接線盒就是插線板,繼電器就是小功率插線板。這個夠直觀吧!
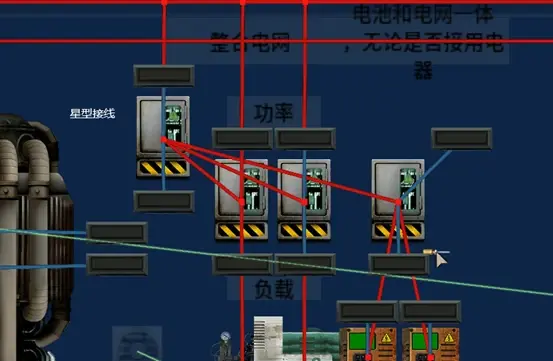
3. 多個接線盒的連線方式,有兩種,即A星型和B串聯型。B存在一個很明顯的問題,就是中間只要任何一個接線盒壞掉了,後面的接線盒都會沒電。而A只要不是最上面的總接線盒壞掉,只會導致電網的部分用電裝置停電。
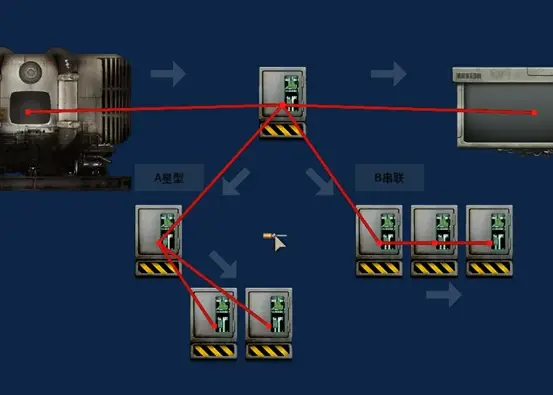 兩種接線方式
兩種接線方式4.還可以把接線盒替換繼電器。但是繼電器預設輸出上限為1000。不同裝置用電消耗不同,各位可以自行計算一下用電總量。
5.電池可是個好東西哦。電池的特性,就是可以在瞬間,依據接入本身的負載,時刻調整功率,即官方的“自動反應堆”。有了電池,就可以解決反應堆自動控制延遲,甚至是電力不足/電力過多的問題了。將電池接到上面的電網,接線盒連線到電池能源輸入上去。此時,電池的能源輸出是否接回接線盒,就成了組合式電網和分離式電網的區分標準了。
組合式電網下面的圖片,所有的接線盒和電池,上方顯示功率,下方顯示負載。
電池能源輸出接回接線盒,此時所有接到接線盒的電器,都在同一個電網內。此時,可以把反應堆抽象為一個發電裝置,其他所有用電裝置,抽象為一個用電裝置,多個電池抽象為一個電力儲存釋放裝置。因為在同一個電網,所以所有的接線盒,都可以抽象為一個大接線盒,顯示的負載和功率相同(其實,按照我的設想,接線盒應該是單獨顯示接入自己部分的功率和負載)。
在組合式電網內,電池也可以充當接線盒。即使用電器只接到了一個電池上,其他電池只要接入電網,也會自動均勻的輸出電力。
(如圖,把500消耗的電燈,只接到一個電池上。開啟,所有的電池和接線盒,顯示相同的數字)
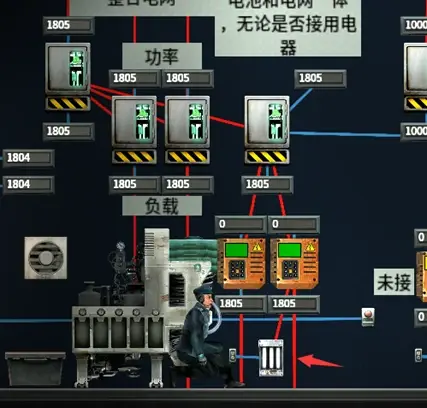 共享負載
共享負載如下圖,上面文字顯示器顯示接線盒功率,下圖平板顯示反應堆情況。在本人使用組合式電網,兩個電池能源輸出均接回接線盒,全速開動引擎的情況下,反應堆負載瞬間超過功率,按照設定,就是瞬間多了1000負載。但是接線盒功率瞬間持平,這就是電池的瞬間調節作用。利用這個特定,可以使用分離式電網,不新增任何額外的元件,實現電池自動處理不足和過載。
回到組合式電網,當瞬間剎車,電池會瞬間降低輸出至0。但是反應堆還是保持原來的輸出,導致形成負載。這就是組合式電網內的電池,無法解決的問題了。
 瞬間補足
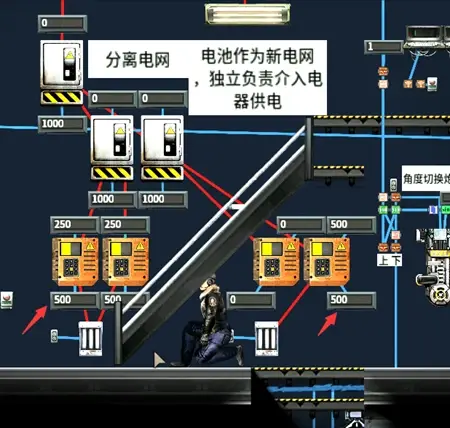
瞬間補足分離式電網
電池輸出不接回接線盒。此時電池和接線盒分為兩個電網,上游電網反應堆-接線盒-用電器+電池,下游電網電池-接線盒-用電器。兩個電網獨立計算接入用電器的負載。典型的,就是卡斯特羅和其無人機。母艦為無人機電池充電,無人機電池驅動全船,電網就被拆分為兩部分了。
在下游電池計算接入電器負載的過程中,如果電器同時接入兩個電池,則負載平分。
此時,可以把耗電動態波動的電器(引擎和水泵),接到電池電網。而保持開啟且無波動的用電裝置(照明,潛水櫃和製氧機),接到上游電網。此方法可平衡負載波動,但是輸出上限取決於電池數量。單個電池500輸入和1000輸出的限制,導致電池放電速度會大於充電速度。
如單獨接一個1000消耗的引擎,需要1個電池單獨供電。但是考慮到充電放電平衡,就需要兩個單獨的電池供電了。
 分開計算
分開計算總結
分離電網,波動用電的裝置可由電池供電(導航臺、引擎、水泵、工作臺、電容器),普通電器直連反應堆接線盒(製氧機,照明,潛水櫃,小型水泵)
組合電網:電池3kw供電需要1接線盒,6kw供電需2接線盒。分離電網,4kw供電需要4接線盒,8kw供電需要6接線盒。
用電量記錄發電/儲電裝置:普通核反應堆輸出5000KW;站點核反應堆輸出20000KW;普通電池/穿梭艇電池儲存2000,輸出1000,充電500;超級電容器儲存20,輸出20kw,充電1000;電池充電充塢,消耗200。
導航裝置:
導航終端2*照明10+駕駛10+聲吶100=120;小艇導航終端1*照明2+駕駛10+聲吶100=115;聲吶監控器100;狀態監控器照明*1+顯示100=105;聲吶換能器100
動力裝置:
小艇引擎500;標準引擎2000;大型引擎4000;小型水泵60;大型水泵照明+泵305
製氧機:
小艇製氧機1000;綠色髮型製氧機照明+製氧1005;工業製氧機1000(同樣是1000電量消耗,前面氧氣400,這個5000!)
照明潛水:
潛水服櫃10+氧氣管架30;探照燈50;這一堆奇形怪狀的燈,消耗都是5。
 奇形怪狀
奇形怪狀工作臺:
結構儀照明+分解505;加工臺2*照明+加工600;醫藥加工臺照明+加工505;研究前哨站照明+研究505。
艦炮武器:
電磁線圈1w;電磁槍照明0+開火1000;連射炮照明0+開火400(離譜);脈衝鐳射照明0+開火5000;雙管電磁槍照明0+開火1000;軌道炮照明0+開火2w;加農炮照明0+開火1w。
12) 電池穩定負載電路應用場景:
組合電網只能解決供電不足的問題,分離電網需要的電池太多了。有無辦法把二者結合起來呢?
參考帖子:
[0.19][電路]緩衝式自動供電裝置 https://tieba.baidu.com/p/8085933925
原理:
電網內形成負載的原因,無非是負載瞬間降低,功率瞬間提高,或是二者比值大於2。且負載突然降低的原因,主要來自於全速開船一腳剎車,造成引擎需要的功率沒了。因此,解決方式有三種:
1.跟隨負載降低反應堆功率。之前版本,各位大佬製作出的自動反應堆,應該就是依照這個想法制作出來的。還記得第一次看到各種大佬製作的自動反應堆,那個曲線重合度,兼職驚為天人。https://tieba.baidu.com/p/7744507432?pid=143319181209&cid=0#143319181209。
2.提高其他用電器負載,補上引擎關閉降低的需求。思來想去,也只有電池調節充電速度,可以來補上需求了。
3.降低比值。在幾十KW的供電和負載面前,引擎那區區幾千,是如此的渺小。那就要造大船了(或是簡單粗暴的修改某個用電器用電量)。
最終,本人按照想法2,製作出了這個電池穩定負載系統。
 大神!
大神!提前說明,電池充電速度,和超級電容器一樣,都是10倍數且四捨五入,如14則取10,18取20。為了電量達到設定電量,實際數值為設定數值+5。如果設定為80,那麼電池電量到76,減法輸出4,實際充電速度就取0了。結果只能充電到75.1%。
電路元件(幾個終端,是用來調整記憶體數值的,可去掉):
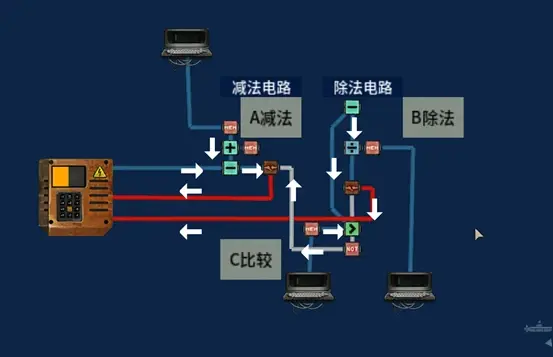
紅色為設定電池充電速度訊號,白色為設定繼電器狀態訊號。
A減法電路,檢測到電量低於設定值(80),則開啟充電
A減法電路,在無過載的情況下,依據電量調整充電速度:加法元件(記憶體5訊號1,記憶體80訊號2)-減法元件(85訊號1,電池電量訊號2)-繼電邏輯器(訊號輸入1,訊號輸出1,C比較結果-NOT-邏輯器狀態)-電池(充能速度)
B除法電路,檢測到過載就開啟充電,無論是否達到了設定電量。
B除法電路.,檢測到過載並調整充電速度:減法元件(反應堆功率訊號1-反應堆負載訊號1)-除法元件(減法結果訊號1,記憶體12.5訊號2)-繼電器(輸入訊號2,輸出訊號2,C比較結果-繼電器狀態)-電池(充電速度)
12.5是依據電池數量決定的負載算出來的(此時為2電池),充電速度=(反應堆功率-反應堆負載)/{【(反應堆功率-反應堆負載)*0.8/(500*電池數量)】*100}
在設定電量遇到過載,兩個電路充電速度衝突,因此優先選擇B電路。A和B不同時開啟,無過載情況下A開啟充電。同時為了避免遇到幾十數值的過載,B電路就開啟,導致A電路關閉,還無法吸收過載,因此還需要一個C比較電路,設定檢測到過載數值>最小充電速度下的負載,才開啟B並關閉A。
 應該能看懂吧
應該能看懂吧最小充電速度負載=500*電池數量*0.1
C比較電路,減法(反應堆功率訊號1,負載訊號2)-比較元件(減法結果訊號1,記憶體數值訊號2)-B繼電器狀態+NOT-A繼電器狀態
執行說明:
設定為80(+5)電量,按照場景分析:
1.電量≥80,平時,無功率過高,關閉充電;
2.電量<80,平時,無功率過高,按照A充電;
3.電量≥80,開啟用電器(引擎),電網功率過低,電池放電,關閉充電;
4.電量<80,開啟用電器(引擎),電網功率過低,電池放電,按照A充電;
5.電量≥80,突然關閉用電器(引擎),電網功率過高,按照B充電;
6.電量<80,突然關閉用電器(引擎),電網功率過高,按照B充電;
測試使用修改引擎,2000負載。上圖為未啟用本電路,下圖為啟用電路。可以明顯的看到,過載明顯的減小了。
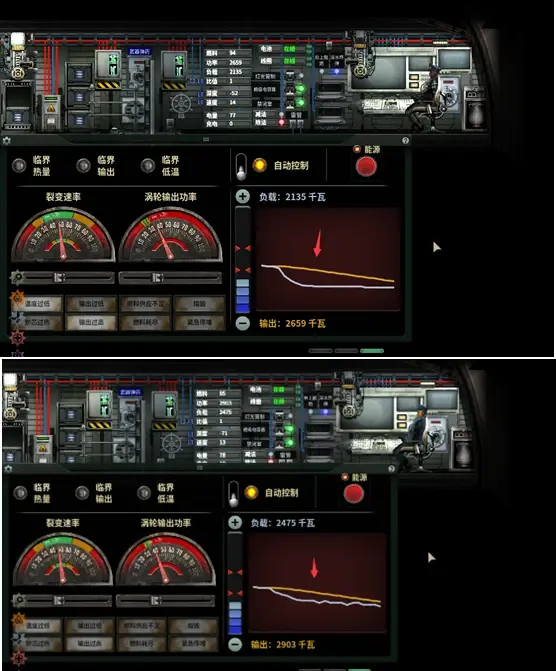 還是有效果
還是有效果戰鬥13) 來襲方向顯示電路
使用場景:
多人聯機,除了船長,誰也不知道哪裡有怪。就算是在指揮室外面加個聲吶,難不成先點開看看哪裡有怪,再退出聲吶面板,然後找到對應方向的炮?好麻煩啊!!!
電路元件:
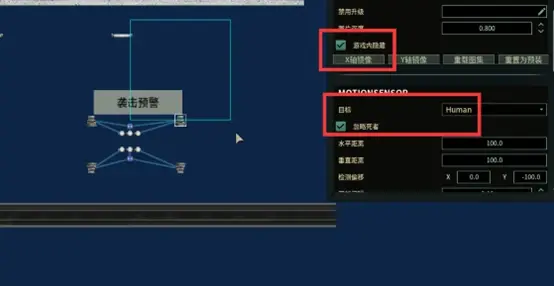 記得設定
記得設定運動感測器(檢測型別為怪物並拉大範圍,訊號輸出)-光學元件(設定狀態,顯示紅色)
元件說明:
記得把運動感測器和導線,放置在船外,然後設定為隱藏(放心,在編輯器內擺放完畢之後,就成為了結構,不會移動)。檢測速度設定為0,把燈擺放在對應的炮塔旁邊。編輯器裡怪物不好控制,就設定為人來檢測可行性了。
如果燈光存在感太小,可以加個應急報警器,就是多個位置就不好區分了。
我這裡,是用人來簡單測試一下。
14) 電容器自動充電電路應用場景:
(常見於新官船)軌道炮/高射炮AI炮手報告“超級電容器電量不足,等待充電”。WTF?這打仗呢,就不能快點充電麼?什麼,只能手動調節充電速度???
電路元件:
 自動化!
自動化!記憶體105訊號1+電容器充電百分比2-減法元件-設定電容器充電速度
紅色導線設定充電速度,右邊部分是顯示開啟是否,就是上面說過的電路(多提一句,最好是所有DIY電路,都加個開關和狀態顯示,不然不好測試)。
元件說明:
1.該電路效果,就是電量越低,充電速度越快,犧牲耐久來換取電量(與其讓AI去修船,不如修電容器,先打死怪物再說)。
2.減法元件,沒什麼可說的。
3.記憶體元件設定值為105,和上面電池一樣的原因。電容器和電池,充電速度只能是10的倍數,中間數字按照四捨五入來取值。如9取為10,11也取10。這就導致,如果設定為100,那麼電池電量到96,減法輸出4,實際充電速度就取0了。結果只能充電到95.1%。
15) 自動電擊線圈電路應用場景:
怪太多了,炮塔打不過來啦!但是直接觸發按鈕,只會浪費電力啊!因為不知道哪些怪到了電擊線圈附近。
參考帖子:
簡單實用的間隔式自動電磁線圈 https://tieba.baidu.com/p/7617706620
 自動化+1
自動化+1電路元件(右邊部分還是設定電路是否開啟以及顯示狀態。左邊的終端連線記憶體,記憶體連線振盪器設定頻率,用於後期修改):
運動感測器+振盪器-AND-繼電器訊號輸出1-電擊線圈觸發介面
執行說明:
運動感測器設定檢測怪物,並持續輸出1。AND門連線運動感測器訊號和振盪器訊號。兩者同時輸出1則開啟電擊線圈。振盪器預設脈衝模式,隔特定時間只輸出1。通過1/秒數X(X一般取4)設定頻率,獲得想要的間隔時間(推薦頻率為0.25)。最後末尾輸出接一個繼電器。
另外,電擊線圈在不是魔改的情況下,只能電暈小怪並造成燒傷,傷害數值有點小,控制效果強於攻擊效果。因此間隔觸發,控制靠近船殼的小怪即可。
元件說明:
1.振盪器,週期性發出-1-1,0-1(包含小數)或1的訊號,可調節模式和頻率。具體可觀看https://www.bilibili.com/video/BV1pQ4y1e7mV 20:45開始的講解。本電路利用預設的脈衝模式,設定頻率為0.25即4秒輸出一次1的方式,來週期性的觸發線圈
2.運動感測器,可以調整範圍長度和線圈一樣,寬度則高於船殼,具體自己定義。
16) WIFI切換炮塔電路應用場景:
船長在指揮室多寂寞哦,不能打炮解決(bushi)!如果指揮室和槍炮庫位置太遠,且人少,船長就能在指揮室遠端接手開炮了。
參考視訊:
【潛淵症實用小教程】按鈕切換炮塔 https://www.bilibili.com/video/BV1ov4y1T7xE
原理講解:
單潛望鏡位置和觸發訊號,使用WIFI元件來傳輸,然後給每個炮塔編號,每次控制特定炮塔,只需要改變WIFI元件頻道即可。
為了防止串臺(一邊移動一邊開火),觸發WIFI元件頻道+1,因此還需要接一個記憶體和加法元件。
為了切斷原潛望鏡的控制,使用訊號燈開關來充當開關,輸出0到繼電器。開關訊號還輸出到訊號檢查元件來設定頻道。每次切換完畢後,要關掉訊號燈開關,解除對原鏡的關閉
電路元件:
 核心就是設定頻道
核心就是設定頻道A潛望鏡-繼電器-2*WIFI元件
B訊號燈開關-訊號檢查元件-設定頻道(記憶體+加法輸出觸發頻道)
B訊號燈開關-NOT門-原繼電器狀態
兩組WIFI元件,左邊是位置資訊,右邊是觸發資訊。潛望鏡旁邊的開關是設定潛望鏡訊號的輸出與否。上炮塔WIFI頻道為位置100,觸發101 。
執行說明:
(1)預設情況下,不開啟關,則潛望鏡不會控制任何炮塔。
(2)開啟潛望鏡開關,則A電路啟用並輸出潛望鏡訊號,但是頻道對不上任何炮塔,因此無效果。開啟上炮塔開關,B電路啟用,此時開關輸出1,有三種同時的結果:
SGN輸出100到左下位置WIFI頻道;SGN輸出100到加法,記憶體數值為1,輸出101到右下角WIFI頻道;開關1輸出到NOT門,關閉原潛望鏡對炮塔的控制。
(3)最終經過兩個WIFI的傳輸,此時下面的潛望鏡,可以控制上炮塔了。
多個炮塔,只要多個SGN輸出不同的值,改變頻道即可。
17) 角度切換炮塔電路應用場景:
WIFI切換還得退出去,好麻煩!
參考視訊:
【潛淵症實用小教程】視角切換炮塔 https://www.bilibili.com/video/BV1mf4y1Z7s8
原理:
潛望鏡位置輸出,接整數元件(也可以不接,會輸出小數),然後和設定角度數值比較(上下180和左右90+270)。輸出1和0來設定兩個炮塔繼電器狀態,實現切換。如上炮塔,角度數值大於180,下炮塔,角度數值小於180。
 不太實用
不太實用但是有一個問題,就是滑鼠位置炮塔在左右兩邊時候,會瘋狂切換,這就是一個無法解決的問題了(即使是大佬使用正規表示式元件)。
原因如下:
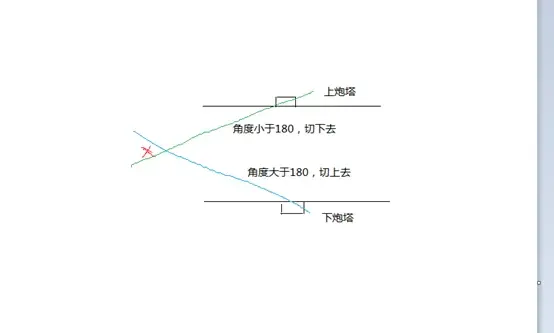 鬼畜原因就是參考位置
鬼畜原因就是參考位置當滑鼠位置在左右兩邊的時候,滑鼠位置相對於上炮塔,角度小於180,此時會切到下炮塔;而以下炮塔為基準時,角度又大於180了,會切上去。兩者互相迴圈,導致不斷切換,只有主動把滑鼠移動到正上方或正下方,才不會鬼畜切換。
解決方法也很簡單,在比較元件後面接上一個延遲門,設定0.5秒。這樣,當手動拉過這左右兩邊至上面的時候,切換命令還是以下面為準。需要注意的是,還是不能把準星留在左右兩邊。
另外,本電路有個致命問題,就是炮塔無法攻擊在靠近判定角度附近的怪物,因為會自動切換。如上下180°切換,那上下船體附近的怪就無法被清理了。
電路元件:
潛望鏡-整數-比較元件(角度訊號1,記憶體訊號2)-延遲門(0.5秒)-繼電器狀態
拓展:
實用功能的介紹與教學 https://tieba.baidu.com/p/7764537759?pn=3
至少,我是沒有弄出來。求大佬@L1A1-F1解答。
18) 鏡控運動電路應用場景:
聲吶控制移動,看不到外面,而且不能操作無人機同時開炮咧。如何製作出利用外部炮塔視野來控制無人機,還能切換開炮的電路呢?詳情參考本電路和下面的雙擊切換電路。
參考帖子:
給大夥寫一篇鏡控無人機的詳細製造方案 https://tieba.baidu.com/p/7981977921
原理:
潛望鏡角度資料,接上一個sin和cos。sin輸出上下1/-1,cos輸出左右1/-1。接個記憶體組建100,可以調整運動了
不按就懸停,終端當前水平垂直速度,記憶體-1000元件乘法,再接個繼電器輸出到引擎水泵上。按鍵切換兩電路
電路元件:
大佬的帖子,已經非常詳細了,本人就不再贅述一遍了。
A鏡控 潛望鏡(位置)-整數-sin+cos-記憶體元件(100數字)+乘法元件-繼電器-sin接到壓載艙,cos接到引擎推力
B懸浮 導航終端(當前水平速度+當前垂直速度)-記憶體(-1000數字)+乘法-繼電器-壓載艙+引擎推力
C長按切換 潛望鏡(觸發)-or(長按輸出1,不按輸出0)-A繼電器+B繼電器
由於潛望鏡的角度判定,需要參考物。在沒有外接探照燈或炮塔的情況下,滑鼠相對於潛望鏡輸出角度。接入外部裝置的情況下,以滑鼠相對於外部裝置輸出角度
19) 雙擊切換電路應用場景:
WIFI切換太麻煩,角度切炮又有致命問題,那該用什麼呢?當然是這款雙擊切換電路啦。
電路元件:
 能用就行!
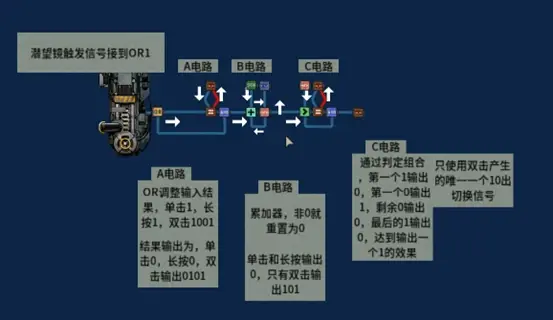
能用就行!看圖吧,藍色訊號線,紅色設定狀態線。本電路分為A,B,C三個部分。輸入端會使用上面提到的鏡控電路中,潛望鏡連線OR的輸出。
接線比較複雜,真佩服能想出來的大佬!由於這個電路,是在是太複雜了,本人也只推匯出了一次。大傢伙就將就看吧(或者說,知道能用就行):
OR部分:潛望鏡連線到OR,單擊一次輸出1,長按輸出持續訊號1。雙擊,則輸出 101。可以有多個1和0,但是這個結構是不會變的。
A部分:OR連線等於訊號1。等於元件真輸出0,假輸出1。結果輸出到上面繼電器設定狀態(預設開啟,輸出1),繼電器狀態又輸出到等於訊號2(相當於,OR輸出和繼電器狀態對比)。最後OR訊號和等於訊號做AND判定,真輸出1,假輸出空。
B部分:B電路部分,本身是個累加器。A結果,連線到加法訊號1。加法結果輸出到記憶體,記憶體接延遲門和輸會到加法2,延遲門經過0.2秒後到SGN,最後SGN接回加法訊號2。在非0狀態下,SGN會輸出數值,讓加法結果為0。
C部分:記憶體為1,等於+繼電器組合和A一樣。B結果輸入大小元件訊號1,記憶體訊號2。最後比較大小結果和等於結果做AND判定。